publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
- SAFESMART
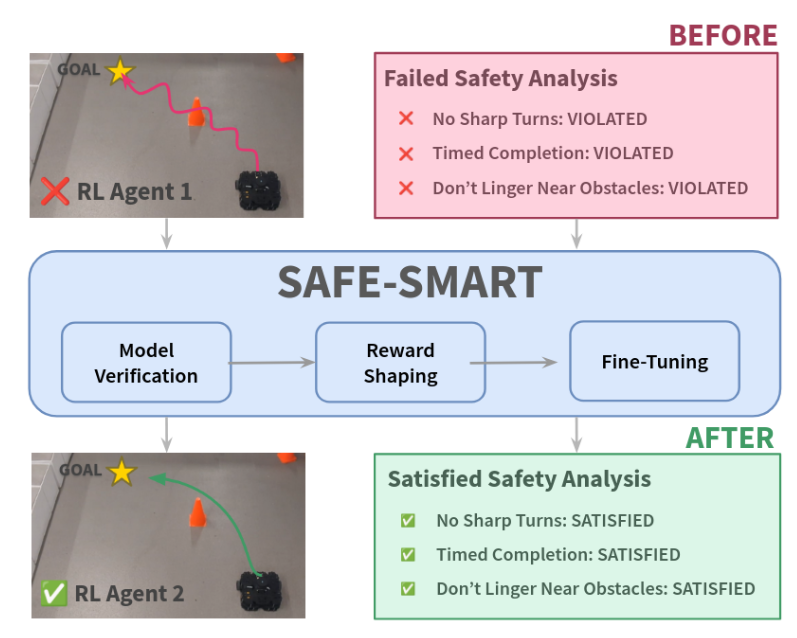 SAFE-SMART: Safety Analysis and Formal Evaluation using STL Metrics for Autonomous RoboTsKristy Sakano, Jianyu An, Dinesh Manocha, and 1 more author2025
SAFE-SMART: Safety Analysis and Formal Evaluation using STL Metrics for Autonomous RoboTsKristy Sakano, Jianyu An, Dinesh Manocha, and 1 more author2025@misc{sakano2025safesmartsafetyanalysisformal, title = {SAFE-SMART: Safety Analysis and Formal Evaluation using STL Metrics for Autonomous RoboTs}, author = {Sakano, Kristy and An, Jianyu and Manocha, Dinesh and Xu, Huan}, year = {2025}, eprint = {2511.17781}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, url = {https://arxiv.org/abs/2511.17781}, } - HALO
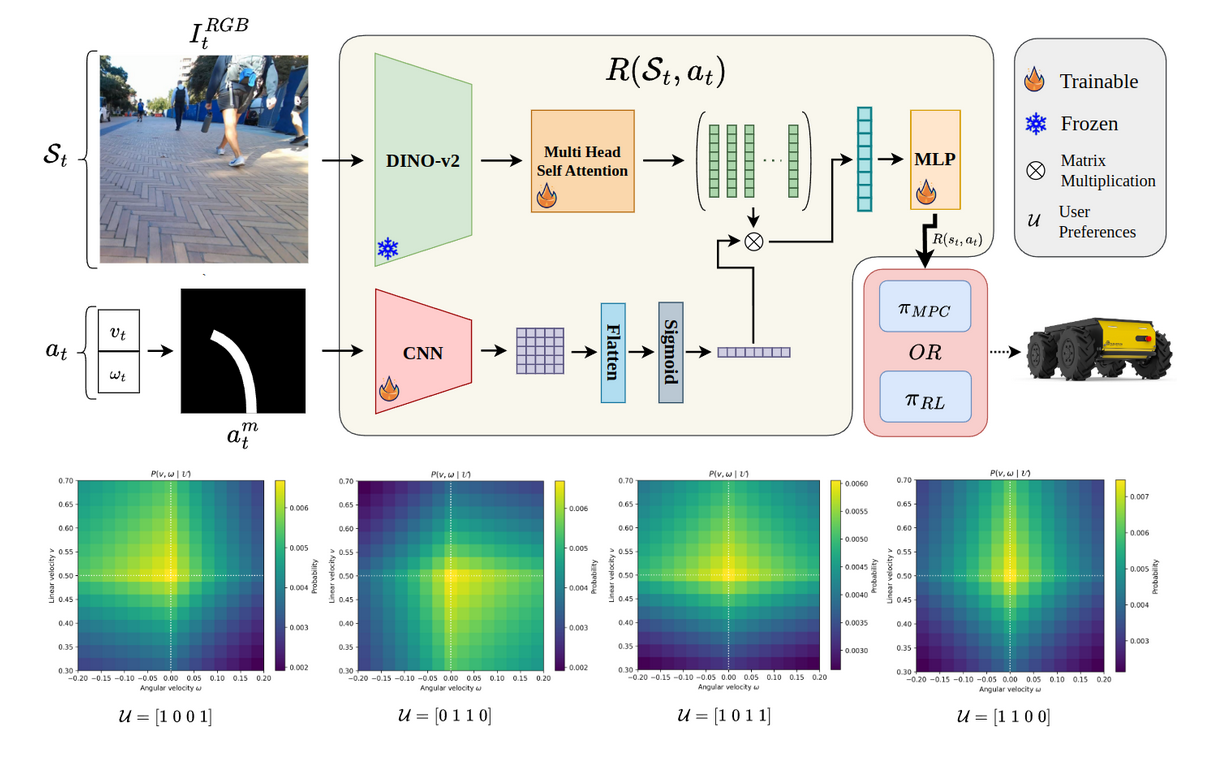 HALO: Human Preference Aligned Offline Reward Learning for Robot NavigationGershom Seneviratne, Jianyu An, Sahire Ellahy, and 5 more authors2025
HALO: Human Preference Aligned Offline Reward Learning for Robot NavigationGershom Seneviratne, Jianyu An, Sahire Ellahy, and 5 more authors2025@misc{seneviratne2025halohumanpreferencealigned, title = {HALO: Human Preference Aligned Offline Reward Learning for Robot Navigation}, author = {Seneviratne, Gershom and An, Jianyu and Ellahy, Sahire and Weerakoon, Kasun and Elnoor, Mohamed Bashir and Kannan, Jonathan Deepak and Sunil, Amogha Thalihalla and Manocha, Dinesh}, year = {2025}, eprint = {2508.01539}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, url = {https://arxiv.org/abs/2508.01539}, }
2017
- Capillary spreading of contact line over a sinking sphereSeong Jin Kim, Kamel Fezzaa, Jim An, and 2 more authorsApplied Physics Letters, Sep 2017
The contact line dynamics over a sinking solid sphere are investigated in comparison to classical spreading theories. Experimentally, high-speed imaging systems with optical light or x-ray illumination are employed to accurately measure the spreading motion and dynamic contact angle of the contact line. Millimetric spheres are controlled to descend with a constant speed ranging from 7.3 × 10–5 to 0.79 m/s. We observed three different spreading stages over a sinking sphere, which depends on the contact line velocity and contact angle. These stages consistently showed the characteristics of capillarity-driven spreading as the contact line spreads faster with a higher contact angle. The contact line velocity is observed to follow a classical capillary-viscous model at a high Ohnesorge number (>0.02). For the cases with a relatively low Ohnesorge number (<0.02), the contact line velocity is significantly lower than the speed predicted by the capillary-viscous balance. This indicates the existence of an additional opposing force (inertia) for a decreasing Ohnesorge number. The capillary-inertial balance is only observed at the very beginning of the capillary rise, in which the maximum velocity is independent of the sphere’s sinking speed. Additionally, we observed the linear relationship between the contact line velocity and the sphere sinking speed during the second stage, which represents capillary adjustment by the dynamic contact angle.
@article{10.1063/1.4991361, author = {Kim, Seong Jin and Fezzaa, Kamel and An, Jim and Sun, Tao and Jung, Sunghwan}, title = {Capillary spreading of contact line over a sinking sphere}, journal = {Applied Physics Letters}, volume = {111}, number = {13}, pages = {134102}, year = {2017}, month = sep, issn = {0003-6951}, doi = {10.1063/1.4991361}, url = {https://doi.org/10.1063/1.4991361}, eprint = {https://pubs.aip.org/aip/apl/article-pdf/doi/10.1063/1.4991361/10158289/134102_1_online.pdf} }
2016
- Bio-Inspired Robotic Undulatory StingrayEmily Studebaker, William Ermlick, Rickey Warner, and 11 more authorsJul 2016
The purpose of this study was to investigate fin undulation as a form of locomotion. The analysis generated CFD simulations and models that identify characteristics that are known to indicate propulsive forces. A mechanical undulating fin was designed and built to experimentally validate these computational results. Comparing thrust data from the mechanical fin with the CFD results yielded qualitative agreement with various parameters including wave amplitude, wave speed, and wave number. Quantifying these characteristics are necessary towards understanding the mechanics of undulation and will aid in the design and control of underwater undulating robotics.